Nanorobots as mobile nanotweezers
Controlled manipulation of nanoscale objects in fluidic media is one of the defining goals of modern nanotechnology. So far, plasmonic tweezers – nanosized tweezers made up of noble metals — are used to trap such small sized cargo. When illuminated by light, these tweezers create a strong electromagnetic field around themselves that can attract and trap nanoparticles in their vicinity. However, conventional plasmonic trapping occurs at fixed spots on the surface of a nanopatterned substrate therefore not efficient in transporting the nanoobjects.
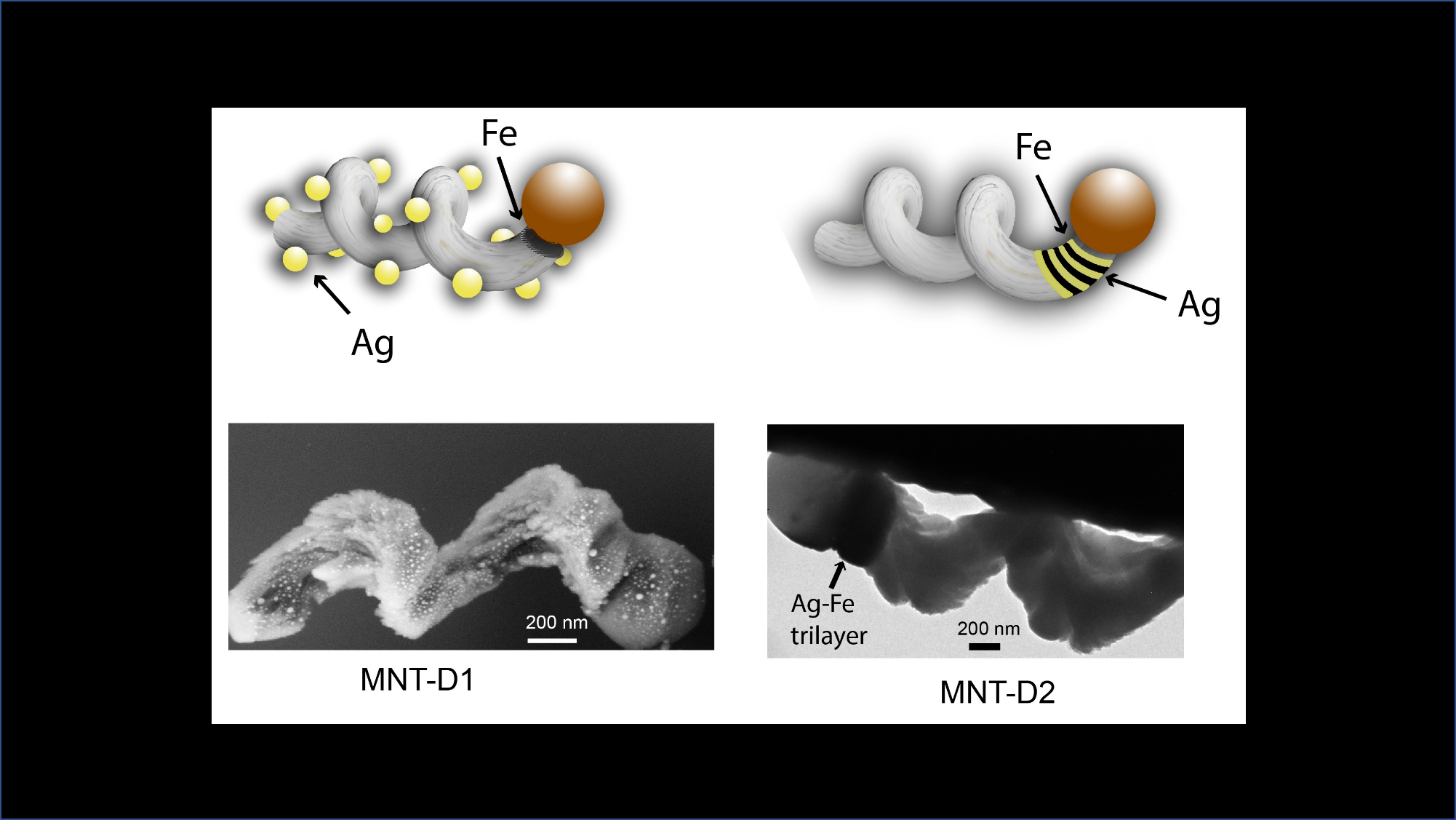
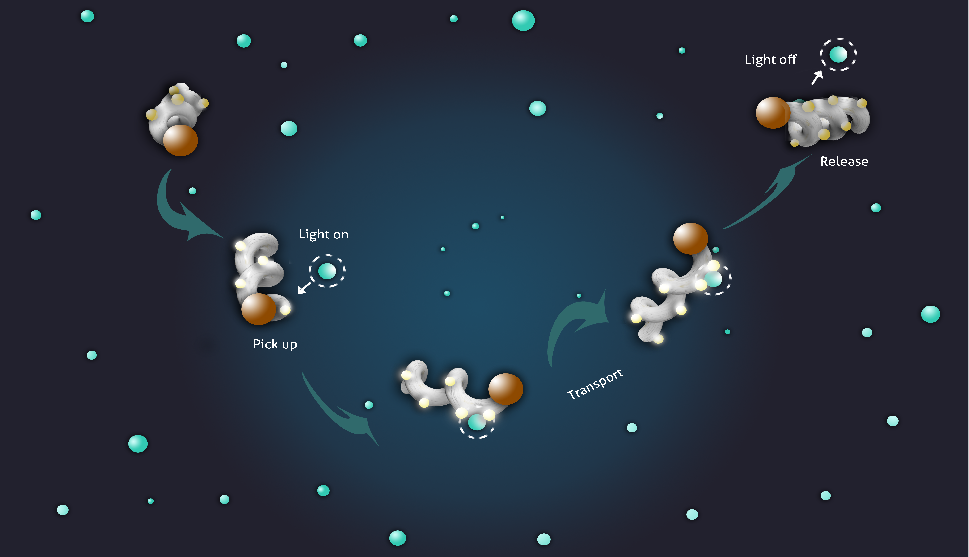
In a recent study published in the journal Science Robotics, Souvik Ghosh, along with Prof. Ambarish Ghosh from Centre for NanoScience and Engineering, IISc, have designed a new class of nanotweezers that can trap and manoeuvre objects as small as 100 nm. These nanotweezers can be remotely maneuvered within the bulk fluid and temporarily stamped onto the microfluidic chamber surface. The researchers achieve this by combining plasmonic tweezers with magnetically driven helical micro robots to design ‘mobile nanotweezers’ (MNTs) that bring together the best of both world. These nanotweezers can be driven to the target objetcs with precise control to capture, transport and release small sized cargo made of various materials with high speed and efficiency. The MNTs can be used to manipulate one or many nano-objects in three dimensions and are applicable to a variety of materials beyond model colloids (i.e. silica, polystyrene) including bacteria and fluorescent nanodiamonds. They can be mass produced and thereafter integrated seamlessly in standard lab-on chip systems, such as to carry out manipulation tasks that are beyond capabilities of currently used technologies. From being able to carry live bacteria to placing very small objects such as nanodiamonds at specific positions on a device, their (MNT) applications could range from biomedicine to quantum technologies, sensor devices and many more.
Reference: S. Ghosh, A. Ghosh, Mobile nanotweezers for active colloidal manipulation. Sci. Robot. eaaq0076 (2018).
More details on our work can be found at:
http://robotics.sciencemag.org/content/3/14/eaaq0076 &
http://www.cense.iisc.ac.in/ambarish/publications/
Our website URL: http://www.cense.iisc.ac.in/ambarish/
Also see page:
http://www.iisc.ac.in/moving-nanoparticles-using-light-and-magnetic-fields/
Other Featured research


